

今回はDCCを少しやり始めると聞くようになるCV値についてご紹介したいと思います。
車両のアドレス番号を変更したい、走行特性を変えたい、ライトの点灯の仕方を変えたい等々
出来るのは知っているけど、どうやるのか分からないという方向けです。
デコーダーの説明書が英語であったり、この辺のことを分かりやすく説明したものがないのでDCCが避けられる要因になっていると思いますので丁寧に説明します。(間違いや要望があればコメントお願いします)
この記事では以下を具体例を交えながらご説明します。
とても長い記事になっていますので目次から目的の所に飛ぶと早いです。
CV値は何のことか
結局、使用するCV番号はどれか
CV値はどうやって変更するのか
CV値を変更するとどうなるのか
CV値を変更して走行特性を変えてみた際の動画です。
そもそもDCCって何?という方はこちらを参照下さい。
DCCを始めた、または始めたいなと思っている方で本をお勧めするとすれば以下の本がおすすめです!

サウンドについて興味がある方はこちらも参考になるでしょう。

CV値とは
CV値とはconfiguration value(設定値)の略になります。
なんだそれ?という感じですね(笑)
おさらいですがDCCは車両にデコーダーという小さなコンピューターを載せて、デコーダーからの命令によって車両を制御する仕組みでした(上記のあわせて読みたいを参照)。
デコーダーから車両を制御するための命令を出すのですが、その命令を変えたい時にCV値(設定値)を変更します。
車両を制御するための命令は沢山あります。例えば、車両のアドレス番号、モーターの動き出しの仕方、サウンドの音量、ヘッドライトの点灯の仕方、テールライトの点灯の仕方等々。
これらの命令の仕方はデコーダーで既に決められており(初期設定値またはデフォルト値)、それらを変更したい時にCV値を変更します。
例えば、CV番号1に対しての機能は車両のアドレス(2桁)でCV値が3に初期設定されています。
CV番号には、それぞれ命令(機能)が振り分けられており、CV番号1は車両のアドレス番号、CV番号2はスタート電圧、CV番号3は加速率、CV番号4は減速率…等々のようになっています(デコーダーによって違いますが、主な部分は共通です。)。
ここで、CV番号は本が入る本棚の番号で、CV値は本と考えていただくと分かりやすいと思います。
「本棚(CV番号)には既に機能が設定してあり、どんな本(CV値)を入れるかはあなた次第」というようなイメージです。
これは表にした方が分かりやすいので、下の表を見てください。なお、重要な部分だけ抜粋しています。
※今回はESUのLokSound 5デコーダーの場合を参考にご紹介しています。良く使用する部分は太文字にしています。(参照元:ESU – 電子ソリューション Ulm GmbH & Co. KG: デジタルデコーダ)
| CV番号 | 機能 | 内容、数値の範囲 | CV値初期設定 |
|---|---|---|---|
| 1 | 車両のアドレス(2桁) | 車両のアドレス番号 1~127 | 3 |
| 2 | スタート電圧 | スロットルが回り始めた時の電圧 1~255 | 3 |
| 3 | 加速率 | 加速率設定値x0.25の値が最大速度までにかかる時間 0~255 | 28 |
| 4 | 減速率 | 減速率設定値x0.25の値が最大速度から停止するまでにかかる時間 0~255 | 21 |
| 5 | 最大速度 | 最大速度 0~255 | 255 |
| 6 | 中間速度 | 車両の中間速度。3点速度テーブルを使用している時(CV番号29Bit4の設定値が0の時)のみ有効 | |
| 7 | バージョンナンバー | デコーダーのバージョンナンバー | – |
| 8 | 工場番号 | 8を書き込むと、工場初期状態に戻る | 151 |
| … | … | … | … |
| 13 | アナログモード(F1-F8) | アナログモードでのF1-F8の設定 0~255 | 1 |
| 14 | アナログモード(F0,F9-15) | アナログモードでのF0,F9-F15の設定 0-63 | 1 |
| 17 | 車両のアドレス(4桁) | 車両のアドレス番号 128~9999 | 192 |
| 18 | 同上 | 同上 | 同上 |
| … | … | … | … |
| 29 | 基本仕様設定 | 車両の進行方向、スピードステップ、車両のアドレスが2桁か4桁か決定する重要なCV値 | 12 |
| Bit | 機能 | 値 | |
| 0 | 前進方向 | 0 | |
| 逆走 | 1 | ||
| 1 | 14スピードステップ | 0 | |
| 28または128スピードステップ | 2 | ||
| 2 | アナログ運転 OFF | 0 | |
| アナログ運転 ON | 4 | ||
| 3 | RailCom利用不可 | 0 | |
| RailCom利用可 | 8 | ||
| 4 | スピードカーブCV2,5,6を使用 | 0 | |
| スピードカーブCV67-96を使用 | 16 | ||
| 5 | 車両のアドレス番号(2桁=CV1)を使用 | 0 | |
| 車両のアドレス番号(4桁=CV17,18)を使用 | 32 | ||
| … | … | … | … |
| 51 | K Slow カットオフ | K Slowが有効な間のスピードステップ 0-255 | 10 |
| 52 | K Slow値 | スピードステップが低い時のK値 0-255 | 130 |
| 53 | 起電力基準電圧 | BEMFの電圧(車両最大速度でのモーターの電圧)を定義。効率が良いモーターであれば、高い値を定義する。 0-255 | 130 |
| 54 | パラメーターKの設定 | Kの値。値が大きいほどBEMFの効きが強くなる。 0-255 | 50 |
| 55 | パラメーターIの設定 | Iの値。モーターの慣性値を定義。モーターの慣性値が高いほど(つまり大きなフライホイールモーターか大きなモーター)、Iの値は小さくする。 0-255 | 100 |
| 56 | 最小速度でのBEMF | 最小速度の際のBEMFの効きの強さの設定 1-255(0-100%) | 255 |
| 57 | サウンドモード1 | 蒸気機関車のドラフト音の間隔。値を大きくするとドラフトがゆっくりになる。小さくするとドラフトが早くなる。 1-255 | 30 |
| 58 | サウンドモード2 | 蒸気機関車のドラフト音の間隔。値を大きくするとドラフトがゆっくりになる。小さくするとドラフトが早くなる。 1-255 | 20 |
| … | … | … | … |
| 63 | サウンドの音量 | サウンドの音量 0-192 | 128 |
良く使用するCV番号
表を見て、めっちゃCV番号あるけど結局どれを使うの?と思われたと思います。
大丈夫です。普段使用するCV番号は少なく以下の通りです。(もちろん他に使用するCV番号もありますがこの記事では代表的な以下を紹介します)
- CV番号1または17,18:車両のアドレス番号
- CV番号29:基本仕様設定
- CV番号51~56:走行特性
それぞれ説明していきます。
CV番号1または17,18:車両のアドレス番号
車両のアドレス番号はDCCで車両を動かす際の番号になります。車両の名前のようなものです。(以下記事も参考になります)

これはどのメーカーのデコーダーであっても初期値が03にほぼ設定されています。(03じゃない場合もあるので注意)
車両によってアドレス番号を変更しないと、DCCコントローラーでアドレス番号を03に設定した際に全ての車両が同じ動作をしてしまいます。
これではアナログ運転と同じなので、車両ごとにアドレス番号を変更する必要が出てきます。
アドレス番号は2桁か4桁を設定でき、2桁(例:00,01,03…etc.)に設定したい場合はCV番号1のCV値を変更、4桁(0030, 1521, 0103…etc.)に変更したい場合はCV番号17,18を変更します。
多くのDCCコントローラーは、車両のアドレス番号は簡単に変更できるようになっているのでCV値を変更することなく変えることが出来ます。
車両のアドレス番号100~127はDCCデコーダーとDCCコントローラーの相性で使えないことがあるそうです。もし使えない場合は、こちらの記事を参照してください
CV番号29:基本仕様設定
こちらは非常に重要なCV番号になります。
車両の進行方向、スピードステップ、車両のアドレスが2桁か4桁か、etc. 決定する重要なCV番号です。
例えば、DCCデコーダーを搭載してコントローラー上は前進で走らせたら、車両は逆走してしまった場合は、CV番号29Bit0の値を逆走の1に設定すれば逆走しなくなります。
ここでBitというのが出てきており訳が分からなくなると思いますので、初期設定値を例に出してご説明します。
| CV番号 | 機能 | 内容、数値の範囲 | CV値初期設定 |
|---|---|---|---|
| 29 | 基本仕様設定 | 車両の進行方向、スピードステップ、車両のアドレスが2桁か4桁か決定する重要なCV値 | 12 |
| Bit | 機能 | 値 | |
| 0 | 前進方向 | 0 | |
| 逆走 | 1 | ||
| 1 | 14スピードステップ | 0 | |
| 28または128スピードステップ | 2 | ||
| 2 | アナログ運転 OFF | 0 | |
| アナログ運転 ON | 4 | ||
| 3 | RailCom利用不可 | 0 | |
| RailCom利用可 | 8 | ||
| 4 | スピードカーブCV2,5,6を使用 | 0 | |
| スピードカーブCV67-96を使用 | 16 | ||
| 5 | 車両のアドレス番号(2桁=CV1)を使用 | 0 | |
| 車両のアドレス番号(4桁=CV17,18)を使用 | 32 |
CV番号29の初期設定値は12です。
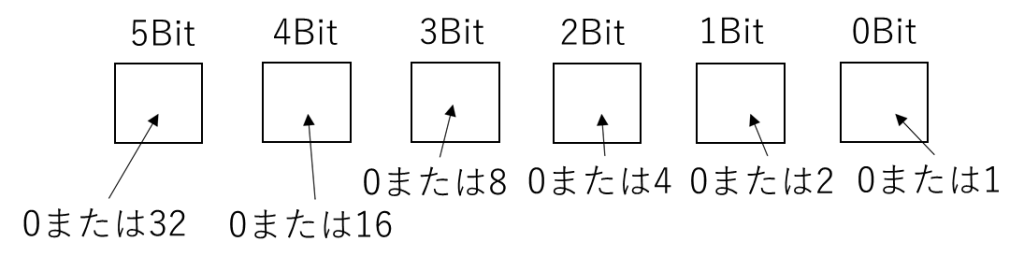
ここで6つの箱(0-5Bit)があるとします。
右から1番目が0Bitの箱、2番目が2Bitの箱…以下同様、という風に名付けます。
この箱に入る値が設定値となります。設定値は上の表を参照ください。
初期設定値が12なので3Bitの箱に4、4Bitの箱に8が入り、合計して12になります。
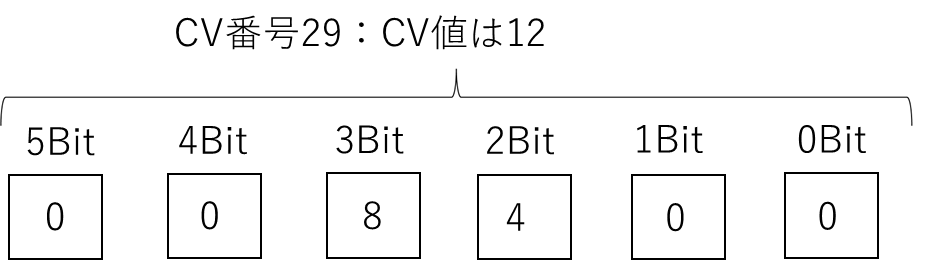
したがって初期設定値12= 「前進方向 、 14スピードステップ 、 アナログ運転 ON 、 RailCom利用可 、 スピードカーブCV2,5,6を使用」 という設定になります。
このように色々な機能の設定をCV番号29でまとめて設定出来てしまうので重要な設定値になります。
CV番号29で具体的に何を設定できるか見ていきましょう。
進行方向
0Bitの箱の部分で設定できます。
車両の進行方向をここでは設定します。初期設定値では「0」なので「前進方向」となります。
車両を動かしたときに、意図した方向に動かない場合は「1」=「逆走」に設定しましょう。
スピードステップ
スピードステップとは、モーターにかかる電圧を停止から最高速度まで何段階で分けるか、という意味です。
14,28, 128ステップの3種類あります。ステップが細かければ細かいほど動きが滑らかになりますので128が最も滑らかです。
初期設定値では「0」なので「14ステップ」となります。
細かくしたければ「2」=28または128ステップに設定しましょう。
ここで、28または128となっているのは、古いデコーダでは128に対応していない為です。
アナログ運転
アナログ運転可能かどうかの設定です。
初期設定値では「4」なので「アナログ運転ON」の設定です。
必要でなければ特に変える必要はありません。
RailCom
また謎な言葉が出てきました。
DCCを行う上でデジタル信号を用いていますが、その信号のフォーマットが色々な種類があるようでRailComはその中の1つです。
これを使えるか使えないか設定できるようですが、初期設定値「8」=「RailCom利用可」で問題ないでしょう。
スピードカーブ
51989_LokSound_5_ESUKG_EN_InstructionManual_Edition-13_eBook.pdf
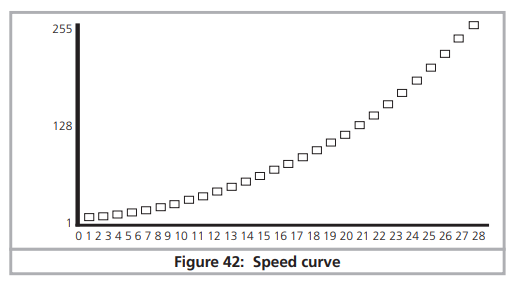
「車両の動き出しから最高速度までの速度カーブをどのように定義するか」の設定です。
初期設定値は「0」=「CV番号2,5,6(スタート電圧、最大速度、中間速度)を使用」です。
もっと細かく設定したければ「16」=「CV番号67-96を使用」にして上の図のように1つずつ値を設定していくことも可能です。
特にこだわりが無ければ初期設定値のままで良いと思います。
CV番号51~56:走行特性
走行特性を変更するためのCV番号です。
| CV番号 | 機能 | 内容、数値の範囲 | CV値初期設定 |
|---|---|---|---|
| 51 | K Slow カットオフ | K Slowが有効な間のスピードステップ 0-255 | 10 |
| 52 | K Slow値 | スピードステップが低い時のK値 0-255 | 130 |
| 53 | 起電力基準電圧 | BEMFの電圧(車両最大速度でのモーターの電圧)を定義。効率が良いモーターであれば、高い値を定義する。 0-255 | 130 |
| 54 | パラメーターKの設定 | Kの値。値が大きいほどBEMFの効きが強くなる。 0-255 | 50 |
| 55 | パラメーターIの設定 | Iの値。モーターの慣性値を定義。モーターの慣性値が高いほど(つまり大きなフライホイールモーターか大きなモーター)、Iの値は小さくする。 0-255 | 100 |
| 56 | 最小速度でのBEMF | 最小速度の際のBEMFの効きの強さの設定 1-255(0-100%) | 255 |
CV番号51:K Slow カットオフ
説明書を訳すと以下の通りです。
CV番号51はCV番号52:K Slow値で定義されたゲイン値をどの内部速度ステップに使用するかを決定します。
ここでいう速度ステップからデコーダは特性を計算し、ゲインを最大(CV54で設定された値)に増加させます。
はい、このような感じですが、良く分かりませんね。
恐らく制御の理論で出てくるパラメーターをいじっていると思われますが、特に問題なければ初期設定値のままで良いと思います。
CV番号52:K slow値
説明書を訳すと以下の通りです。
CV 52 は、速度ステップ 1 の低速走行区間のゲインコントロールを別途制御します。
低速走行時や発進時の走行挙動に不満がある場合(中高速域では問題なし)、CV52の値をCV54に設定されている値より5~10程度大きくしてください。
これも制御のパラメーターを変更していますよという意味と思います。中身は置いておいて、重要なフレーズが出てきました。
低速走行時や発進時の走行挙動がスムーズにいかない場合は、CV番号54で設定された値よりも5~10大きく設定すればよいことが書かれています。
これは調整する際に使えそうですね。
CV番号53:起電力基準電圧
説明書を訳すと以下の通りです。
CV 番号53 ではBEMFの起電力基準電圧(モーター最大回転数時)を設定します。
この値は線路電圧やモーターの効率によって異なります。
もし4分の3程度のスロットル操作で機関車が最高速度に達し、スロットルの3分の1が速度に影響しない場合、CV番号53のCV値を小さくしてください。
CV 番号53のCV 値を5~8程度小さくして、再度テストを行います。
この作業を、スロットル全開時に車両が最大速度に達するまで繰り返します。
CV番号53の値は「車両のモーターの最高回転時に、DCCコントローラーも最高速度になるように調整する値」です。
したがって、モーターの種類によって変える必要があります。
初期設定値のままで挙動がおかしい場合は、上の説明のように調整しましょう。
CV番号54:パラメーターKの設定
説明書を訳すと以下の通りです。
パラメータ K は、負荷制御が走行性能に与える影響の強さに影響します。Kの値が高いほどより多くの負荷制御が、あらゆる変化に対応し、モーターの回転数を調整します。
パラメータ K は、車両の走行にばらつきがある場合に調整が必要です。
CV54の値を5下げて、車両を試運転して挙動が改善されるかどうか確認します。ステップ1の速度でスムーズに走行できるようになるまで、この手順を繰り返してください。
車両を重連する場合に、うまく走らない場合にこちらの値を調整することが多いようです。
私の理解ですと「モーターの挙動をどのくらい敏感にするのか決定する値」です。
値を大きくしてしまうと、微小な変化にもモーターが大きく反応してしまいギクシャクするので初期設定値より下げていくと上手くいくと思います。
CV番号55:パラメーターIの設定
説明書を訳すと以下の通りです。
パラメータ I は、モーターにどれだけの慣性があるのかを定義する値です。
大きなフライホイールをもつモーターは、当然ながら小さなフライホイールモーターやコアレスモーターよりも慣性が大きくなります。
車両が停止直前で多少カクカク動く場合やいきなり低速になったり、単にスムーズに走らない場合は、パラメータIを調整します。
-初期設定値から5増加させる。(フライホイールが大きい場合)
-初期設定値から5減してください。(フライホイールが非常に小さい、またはない場合)
満足する挙動になるまでこの手順を繰り返します。
パラメーターIは「モーターにどれだけの慣性があるのかを定義する値」ということが分かりました。
ここで慣性という言葉が出てきますが、これは物理の言葉で、「物体が力を受けた時に、その物体がどのくらいその運動を続けるか」表す値です。
難しいことを言いましたが、説明書に書いてある通りモーターが大きければ大きいほど、回り続ける(慣性は大きい)ので、パラメーターIの値は大きくしなければなりません。
HOゲージで天賞堂のパワートラック等、小さなモーターを使用する場合はこちらを変更する必要があります。
CV番号56:最小速度でのBEMF
説明書を訳すと以下の通りです。
低負荷時の負荷制御の強さを設定できます。
速度ステップ 低速域での走行がスムーズにいかない場合、CV 56 の値を小さくしてください。
BEMFとはBack ElectroMotive Forceの略で、「DCCデコーダーが受信した速度指示信号と実際のモーターの回転数の差をチェックして常に一定速度になるようにモーターの回転数を補正する機能のこと」でした。
BEMFの効きの強さを低速域の範囲で決めることが出来るのがCV番号56です。
説明書にある通り、値が大きすぎるとBEMFが効きすぎてスムーズな走りにならない場合があるのでそういう場合は値を小さくしましょう。
CV値の変更の仕方
DCCを始めた方なら持っている、DCCコントローラーから変更出来ます。
今回はKATOのD101とDeskstop stationのdsair2で変更の仕方を見てみましょう。
ここでは簡単にCV番号29の数値を変更して進行方向を逆にしてみましょう。
基本的にDCCデコーダーを搭載した車両を線路に乗せて、DCCコントローラーを線路につなげればOKです。
またDCCコントローラーを使わずにCV値を変更する手段として、ESU製のデコーダーに対応している「Lok programmer」という商品があります。
こちらを使った方が正直楽で、CV値の値を一覧で見ることが出来たり、サウンドの書き込みも出来るのでお勧めです

KATO D101でCV番号29の数値変更
セッティングはこのようになります。線路からのコネクターはDCCコントローラーのプログラムというところに接続します。

プログラムというボタンを押して「PAGE]という表示にします。

右隣の「CVのボタン」を押してCV番号29を変更するので「29」を押します。

現在デコーダーに書き込みされている値を読み出します。「CVボタン」の右隣の「+」のマークを押します。
31が書き込まれていることが分かりました。

既に私が逆走を設定している(CV番号29Bit0の設定値が1=逆走)ので、方向を変えるとするとCV番号29Bit0の設定値を0=前進方向にします。
つまりCV番号29のCV値を30にすれば良いわけです。
「30」を押して、「ー」ボタンの書き込みを押せばCV値を書き込めます。

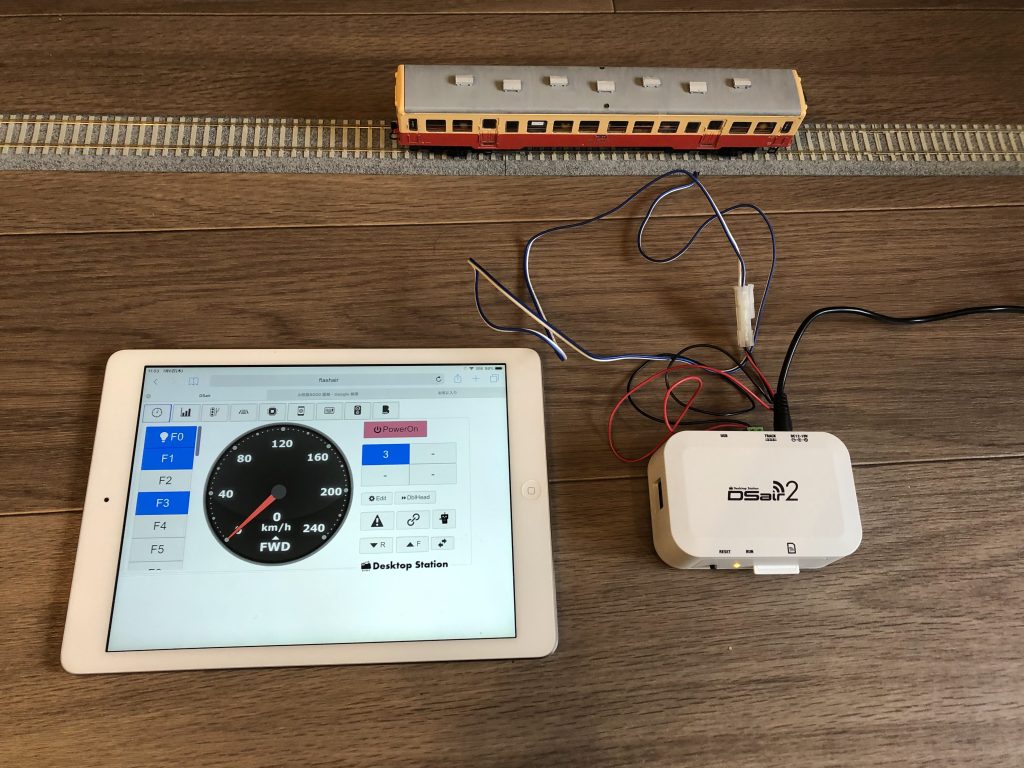
Desktop station Dsair2でCV番号29の数値変更
セッティングはこのようになります。
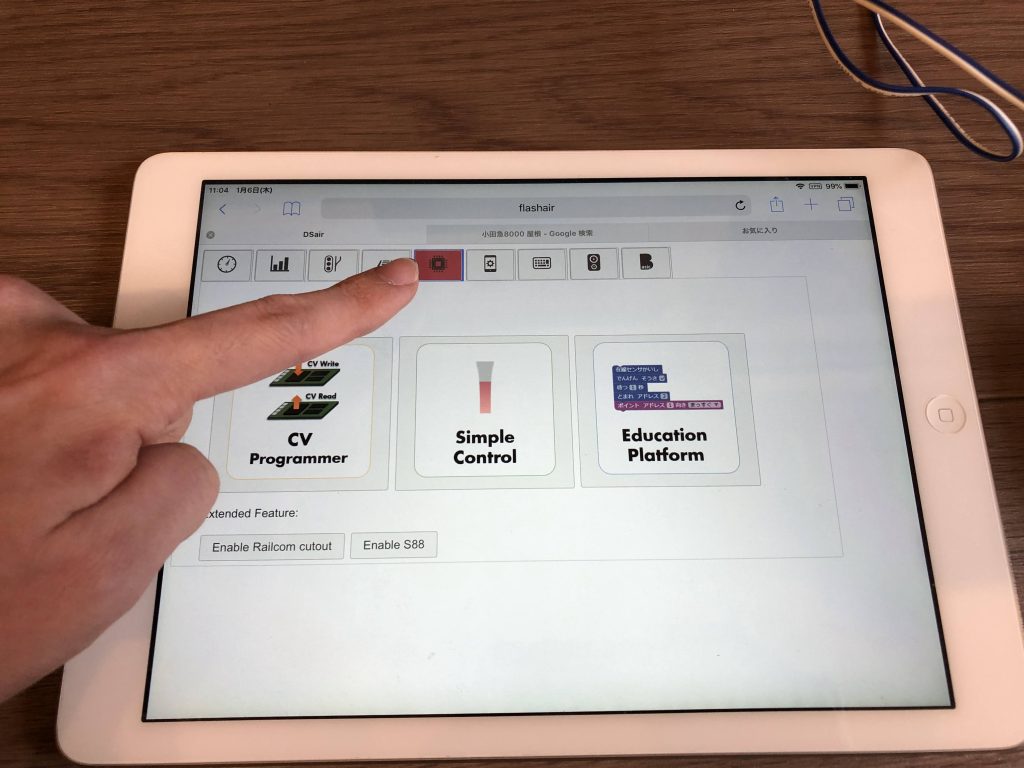
左から「5番目のタブ」(四角いICチップのような記号がある部分)をタップします。
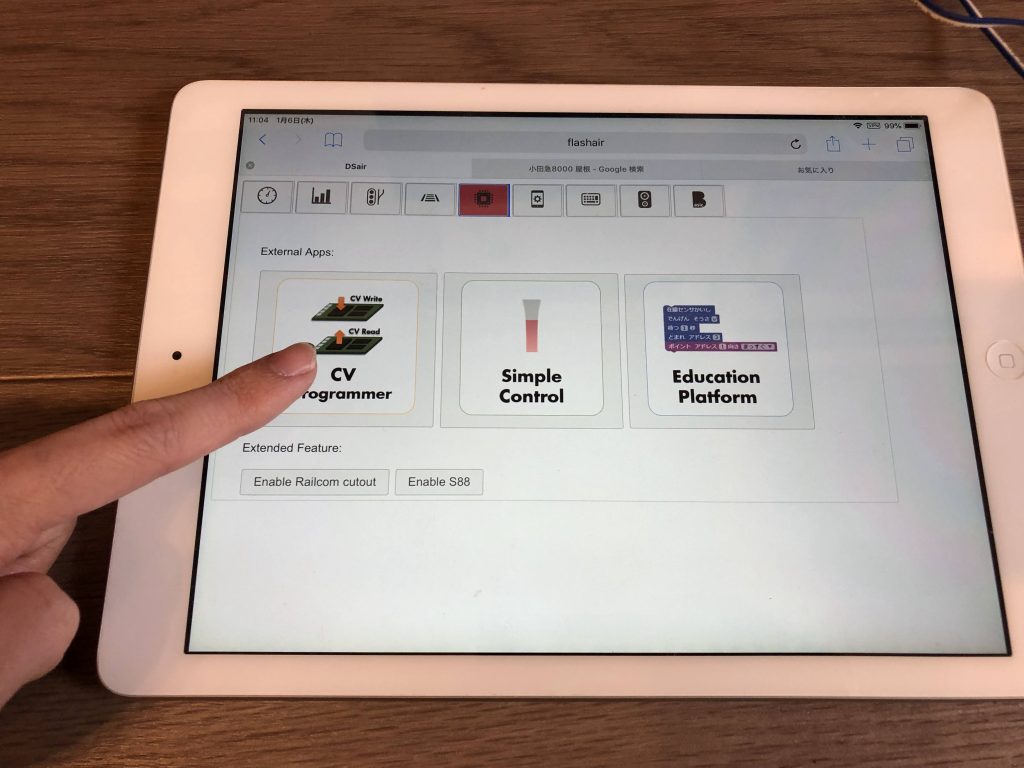
そうすると「CV Programmer」というものが左から1番目にあると思いますがこちらでCV値を変更できます。
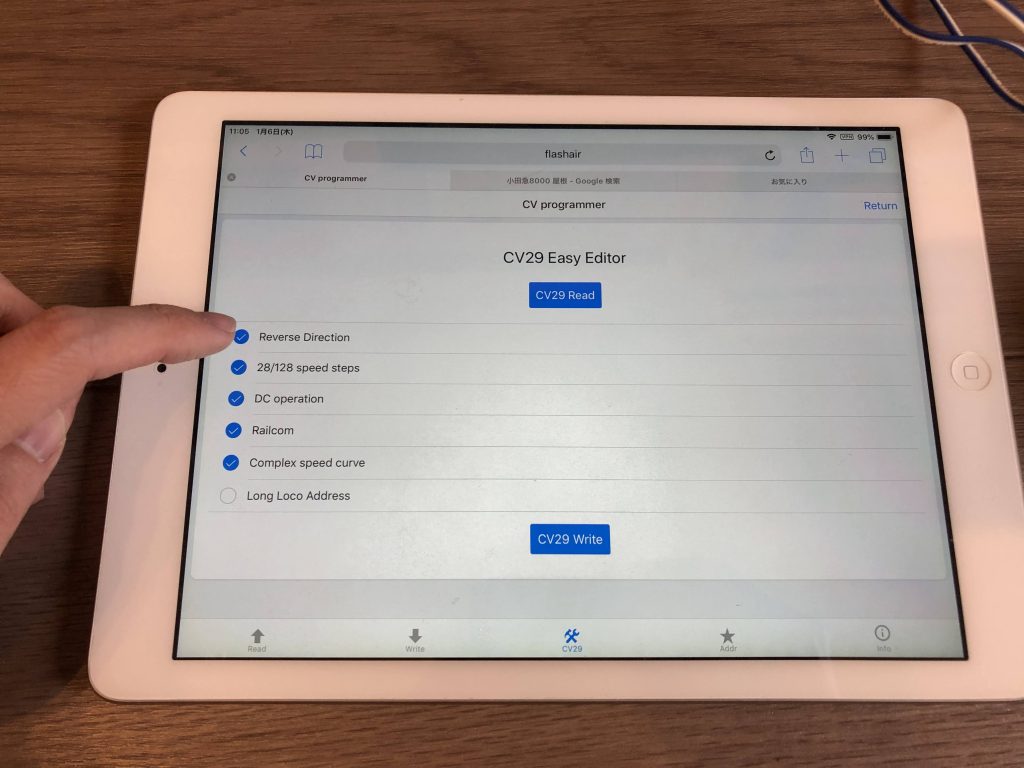
Dsair2は親切で、CV番号29は重要な物なのでCV番号29専用の編集画面があります。「下のタブの真ん中の工具のマーク」を押してください。
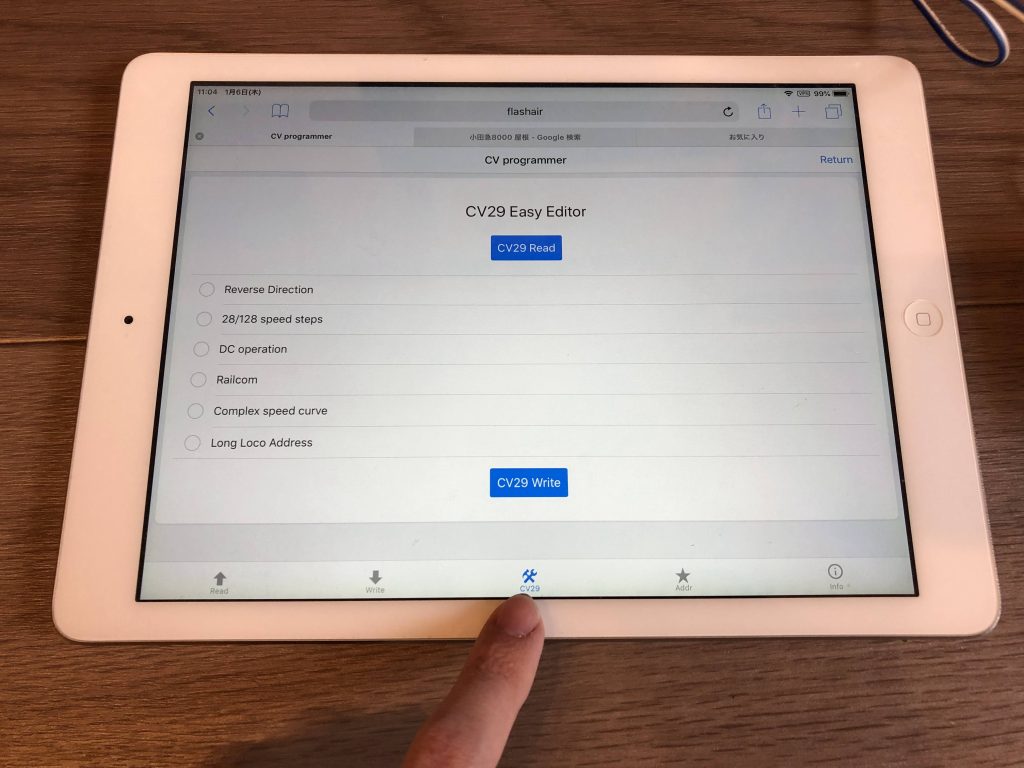
「CV29 Read」を押せば、設定値が読み取れます。チェックマークがついているのが設定されているものになります。
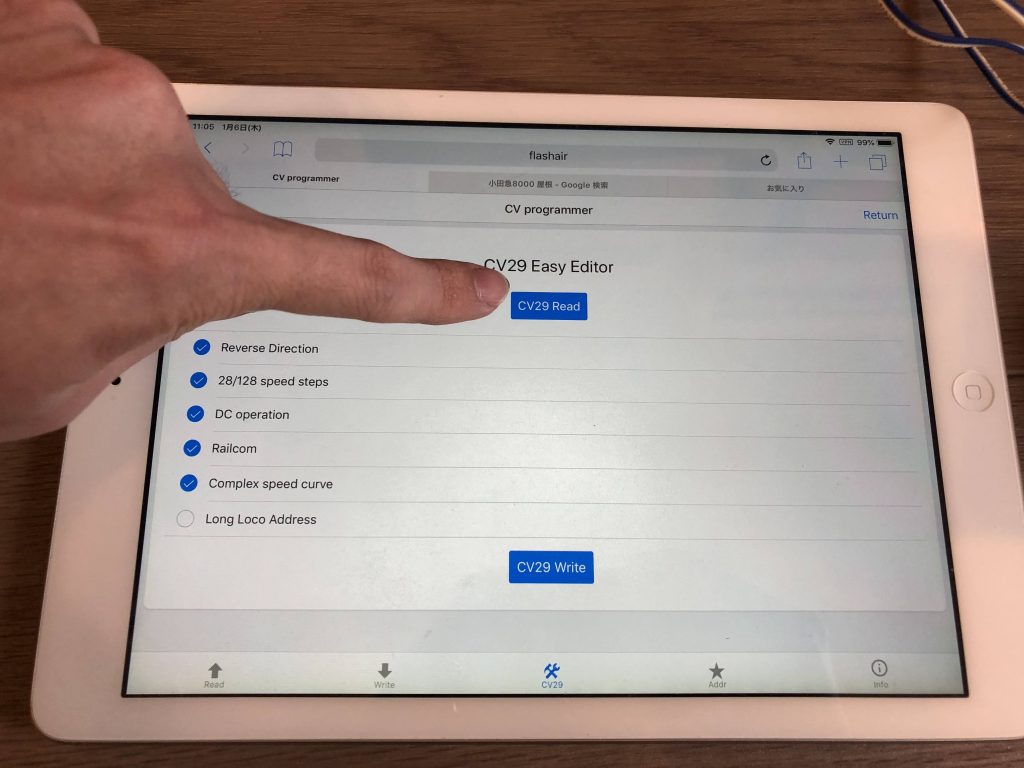
既にReverse Direction(逆走)が設定されているので、方向を変えたい時はこの部分のチェックマークを外して「CV29 Write」を押せばOKです。
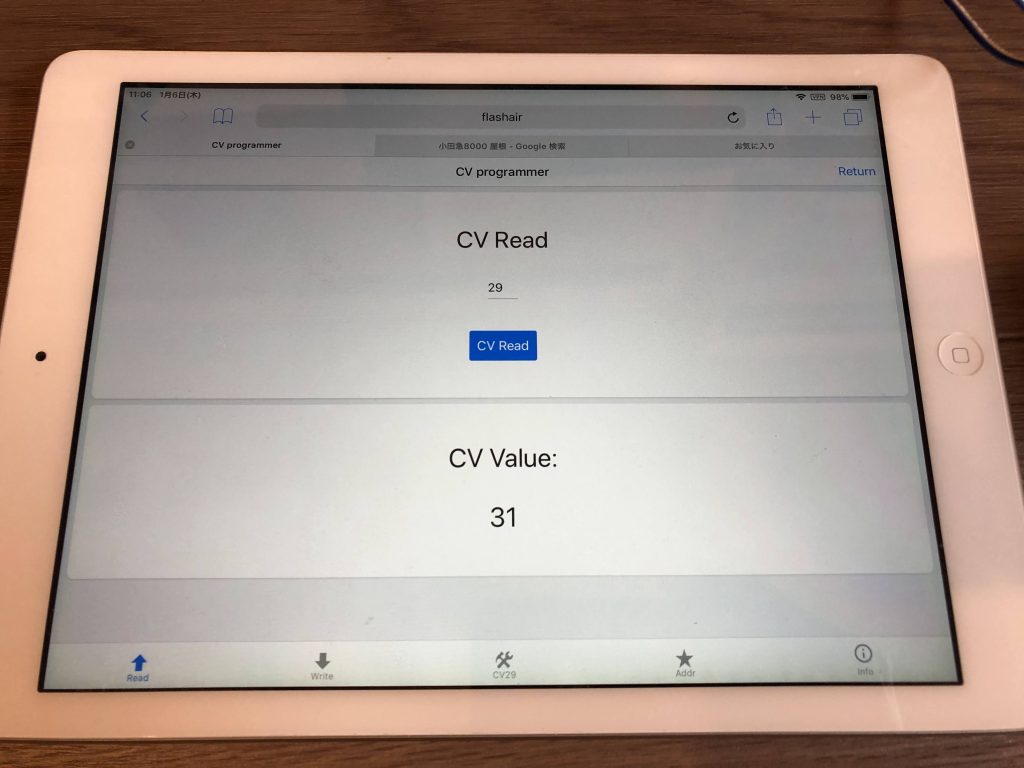
ちなみに、その他のCV番号は下のタブの左から1番目の「Read(読み込み)」と2番目の「Write(書き込み)」で読み込みと書き込みができます。
CV値を変更して、走行特性を調整する
走行特性を変更することも簡単です。
今回は例としてPLUMの小湊鐵道をあげます。
こちらの動画の出発し始めを見て頂きたいのですが
カクカク動いてます。あんまりスムーズな走行とは言えないですね。
これはモーターの特性とデコーダーでのCV値設定が上手く合っていないことが原因です。
今回走行特性を変更する際に以下の値を変更してみました。(絶対この値にすればOKということはなく試行錯誤で自分が納得した値にすることが重要です)
| CV番号 | 機能 | 内容、数値の範囲 | CV値初期設定 |
|---|---|---|---|
| 51 | K Slow カットオフ | K Slowが有効な間のスピードステップ 0-255 | 10 |
| 52 | K Slow値 | スピードステップが低い時のK値 0-255 | 130 |
| 53 | 起電力基準電圧 | BEMFの電圧(車両最大速度でのモーターの電圧)を定義。効率が良いモーターであれば、高い値を定義する。 0-255 | 130 |
| 54 | パラメーターKの設定 | Kの値。値が大きいほどBEMFの効きが強くなる。 0-255 | 50 |
| 55 | パラメーターIの設定 | Iの値。モーターの慣性値を定義。モーターの慣性値が高いほど(つまり大きなフライホイールモーターか大きなモーター)、Iの値は小さくする。 0-255 | 100 |
| 56 | 最小速度でのBEMF | 最小速度の際のBEMFの効きの強さの設定 1-255(0-100%) | 255 |
- CV番号52:130→4
- CV番号53:130→75
- CV番号54:50→30
- CV番号55:100→30
変更前と変更後を動画にまとめてみましたが、このような形でスムーズに走るようになりました!
まとめ
DCCを導入すると出てくるCV値に関して紹介しました。
CV値を変更することによって車両のアドレス番号を変更したり、ライトの点灯の仕方を変えたり、走行特性を変えることができます。(ライトの設定等は別記事にて)
DCCを導入して自分だけの鉄道模型にしましょう!


コメント